目次
1. Summary
I tried 3D mapping (SLAM) using Lenovo Phab2 Pro & RTAB-Map, so I would like to introduce it.
2. What is SLAM
SLAM is an abbreviation for Simultaneous Localization and Mapping, and it seems to be translated in Japanese as “simultaneous execution of self-position estimation and environment mapping”.
If you refer to the definition of MathWorks, which is famous for MALTAB (R),
It is a generic term for technologies that simultaneously estimate the position of a moving body and create an environment map. By using SLAM, it is possible to create an environment map in an environment where the moving body is unknown.
Anyway, SLAM is a kind of technology required for autonomous running of robots, and seems to be installed in recent house cleaning robots like Roomba .
3. Equipment
- Lenovo Phab 2 pro (Unfortunately, the product is discontinued)
- Install RTAB-Map.
4. Result
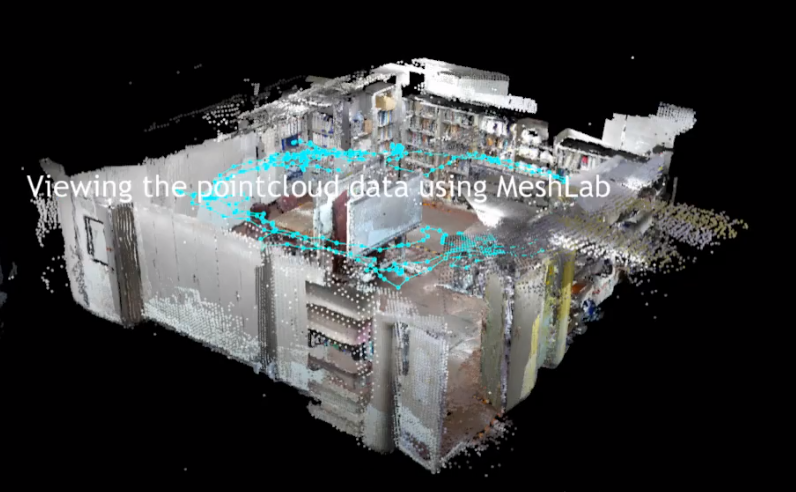
This is a video that I tried to map the conference room. I uploaded it to Youtube.
The first half of the video is the screen screen of Lenovo Phab2 pro, which is the screen screen on 3D mesh processing software.
You can see how it can be mapped unexpectedly quickly.
Since it is point cloud data, it can be edited with 3D mesh processing software such as MeshLab.

コメント