目次
1. 目的
Lenovo Phab2 Pro & RTAB-Mapを使って3D マッピング(SLAM)やってみましたので、紹介したいと思います。
2. SLAMとは
SLAMとは Simultaneous Localization and Mappingの略で、日本語では 「自己位置推定と環境地図作成の同時実行」と訳されるみたいです。
MALTAB(R)で有名なMathWorks社の定義を参照すると、
移動体の自己位置推定と環境地図作成を同時に行う技術の総称です。SLAMを活用することで、移動体が未知の環境下で環境地図を作成することができます。
らしいです。SLAMはロボットの自立走行に必要な技術で、最近のお掃除ロボットとかにも搭載されているみたいです。
3. 使用機器
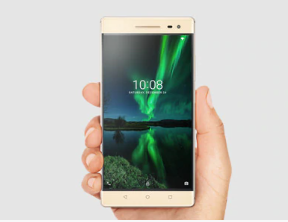
・Lenovo Phab 2 pro (残念ながら現在販売終了です)
・RTAB-Mapをインストールします。
4. 結果
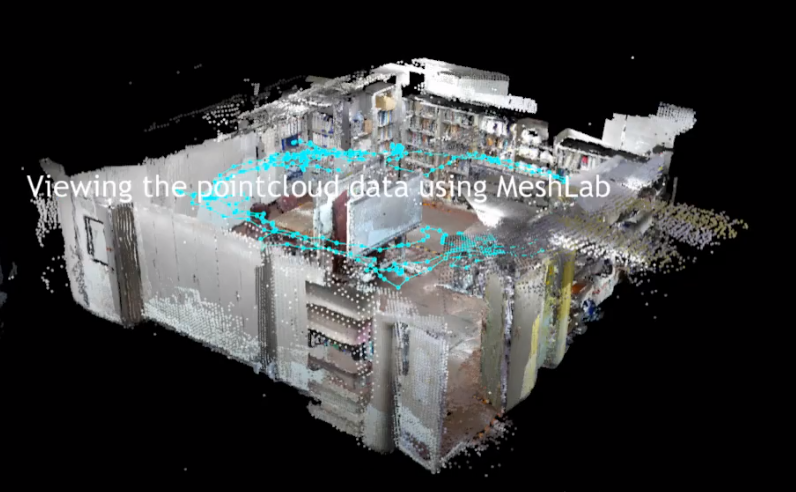
試しに会議室をマッピングしてみた動画です。Youtubeにアップロードしました。
動画の前半はLenovo Phab2 proの画面スクリーンで、3Dメッシュ処理ソフトウェア上の画面スクリーンになってます。
意外とさくさくとマッピングできる様子がわかると思います。
点群データ(point cloud)になってますので、MeshLabなどの3Dメッシュ処理ソフトウェアで編集が可能です。

コメント